College of Engineering Unit:
This project aims to create a system that delivers ready-to-install parts to a robot that will install the desired part. The parts will be delivered to the factory in pallets that include a variety of parts. The parts are then decanted from the incoming pallet and provided to a separate automated assembly cell.
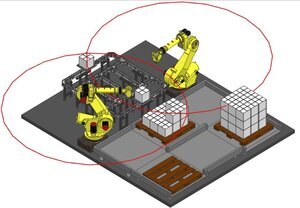
Our project defines decanting as the process of removing the desired part from the packing used in shipping. The process must be automated, modular, replicable, and exist in a defined footprint from the sponsor. The decanting cell shown here will provide unboxed components at an accurate location, which can be picked from by an automated assembly cell, installing a component to a product on an assembly line.
Currently, the pallets are being delivered and decanted by people which can be unreliable, not meet cycle time, and can be hard to fill headcount. The automated system will allow the assembly line to consistently hit a twenty-second cycle time allowing production to run smoothly. The design utilizes a pallet conveyor system, two R2000 robots, a linear motor system, and a variety of sensors to create the desired movements. The full-scale design will have a footprint of five by seven meters.
Each lane in the linear motor system can account for a different part variation or color. This ensures the installation cell always has the correct part accessible during the twenty-second cycle time. The linear motor system acts as an accordion in the system: parts will build up and be stored in the correct lane so, if there is a delay within the pallet conveyor system it will not affect the cycle time at the end of the cell.
The pallet conveyor system includes a T intersection that allows misplaced pallets to be removed from the system with very little wasted movement. The operating procedure consists of:
- The pallet enters the cell and travels to the depalletizing station.
- The R2000 robots decant the pallet by layer and drop it on the linear motor system presenting the station.
- The part travels through the linear motor system and gets sorted by part number, design, color, etc.
- The part is presented to be removed from the next cell that will install the part.
The team created a full working simulation in Siemens NX Mechanical Concept Designer that models the pallet decanting process. It also shows a representation of part sorting in the linear motor system and the versatility of the design. The simulation and design were the main requirements from the sponsor, but the team aims to create a quarter-scale model of the system to be presented at the expo, so keep an eye out for the physical scaled model.