College of Engineering Unit:
Introduction
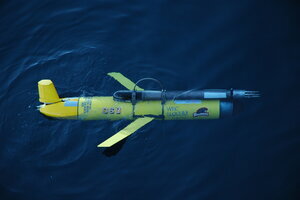
Picture this: somewhere deep in the heart of the Atlantic Ocean. A lone autonomous submersible, a Slocum Glider makes its descent. The Slocum Glider dives underwater in a sinusoid motion collecting ocean data. The glider surfaces for a moment, records wave data, and begins the apex function of its destiny. With a custom onboard scientific computer and a data processing scheme that would make Tesla blush, the glider processes the data from its most recent mission. Using state-of-the art compression and geo-linked satellite communication, the Glider beams the most critical data points back to basecamp. Without a moments delay, the scientists at basecamp receive the data into their analysis pipeline. Bravely, they process this data to provide the globe with real-time nautical data needed by mariners to observe ocean surface wave conditions.
Project Overview
The Glider Project is an ongoing research project conducted by Kipp Shearman, Pat Welch, and Kai-Fu Chang. The paramount goal of the glider project is to autonomously measure wave patterns and conditions via Autonomous Underwater Vehicle (AUV) gliders, then use this data to build polar plot spectrums for predictive and historical models. Data is already being collected via buoys, but there is no good way to measure wave data in the deep ocean. By incorporating the same technology on these buoys to ocean gliders, we can increase the number of data collection points in the ocean. This data can then be used by many industries. For example, commercial shipping, ship designers, and coastal engineers.
Current Conditions
The state of wave measurements is mainly reliant on fixed moorings. Fixed moorings have the advantage of accessibility because they are close to shore. However, they suffer from several limitations that the Glider Project hopes to address. Namely, fixed moorings are expensive to install, prone to damage, and limited in their radius of measurement.
Existing System
The Glider project has been a multi-year project, and the CS/ECE 2021 teams will be adopting some initial implementations. On the hardware side, much of the work done by the previous ECE team revolved around a custom PCB for connecting sensors. This PCB design may or may not have been lost over the summer. As a result, the ECE team implemented a new PCB design from scratch. The previous years CS team nearly completed the polar plot spectrum needed for the end-user to analyze the wave data. We can feed the output of our data processing pipeline into the polar plot from the previous team.
implementation:
The glider is already deployed for various other projects. Every few hours the glider surfaces to send its findings back to shore via satellite. The ECE team we are collaborating with implemented a module to be installed on these ocean gliders that will extract acceleration data while the glider floats on the surface. The raw acceleration data is recorded with the accelerometer implemented by the ECE team and saved to an SD card using their custom PCB.
The values we will calculate in our implementation include significant wave height, average wave period, peak wave period, mean zero up cross wave period, peak wave direction, peak wave power spectral density, and more. These calculations will be saved into pre-allocated memory on the glider at the end of each data collection period (about 20 minutes), queuing them to be sent over a satellite link the next time the glider surfaces. In addition, the raw acceleration data in the x, y, and z directions will be written to an SD card to be extracted later for further calculations. Additionally, we created an onshore program in python for more extensive calculations. Using the raw acceleration data from the SD card on the glider, this python program will calculate all the same information as the glider code, using various calculation methods, including the Welch method and banding using different windowing techniques.
Project Website(s):