College of Engineering Unit:
Our team worked alongside a mechanical engineering team to produce a 3D printer which can print in an effectively unlimited area. It achieves this by allowing the user to move the printer around to work on different sections of the model being printed. The printer will be able to print in five axis (X, Y, Z, and rotate around two of these), allowing it to print a wider variety of models. It will utilize this additional capacity to print directly onto arbitrary surfaces other than a flat plane.
The ultimate goal for these developments is to produce a printer which can work on part of a print job, complete that section, and then be moved by the user to another location in order to begin work on the next section of the overall model. Because of this intent, the printer can not be bound to a limited gantry system but should instead have a practically unlimited print area once mobility is taken into account. Along the way, other technologies might be utilized in order to achieve these goals. Standing out among these are the potential use of computer vision in order to allow the printer to orient itself in space after movement, as well as the use of a simulation in order to help design the printer and the algorithms which will be used to drive it.
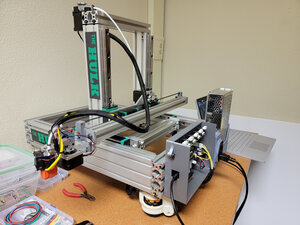
We have produced a prototype printer capable of receiving commands via wired serial port communication, moving motors to control all five axis accurately, extruding filament, and using stall detection to set its home position. A companion program designed to perform the inverse kinematics to control the printer has also been produced. The prototype can be easily moved via caster wheels, and prints outside of a limited volume in five axis as will be required of a truly mobile printer.