College of Engineering Unit:
Today, robots are becoming increasingly more and more popular and used many industries. Robots need to maneuver around their environment safely and requires a system to detect objects. Our project Collision Avoidance for Autonomous Mobile Robots aims to become the vision for autonomous mobile robots through the use of a suite of detection tools. These tools are developed to assist autonomous mobile robots in avoiding collisions with objects such as boxes, tables, and chairs as well as avoiding falling off edges/cliffs like sidewalks. These detection tools utilize point cloud simulation and bounding boxes as the tools for achieving the object and edge detection. We used simulated data when initially developing the tools. Then we proceeded to obtain some data captured by a ESPROS TOF camera that is in a form of a depth image. These depth images are then converted into a point cloud for useable information used in the detection tools. Some applications that object and edge detection might be useful in would include warehouse management, delivery services, cars (self-driving/additional safety features), security cameras, and so much more. All of these applications would benefit primarily from the increase of efficiency and consequently drive up the profit margin for businesses who incorporate these tool into their operations.
The suite of detection tools includes:
EdgeDet.py - Preforms edge detection on an image
EdgeDetRT.py - Preforms edge detection on a stream of images
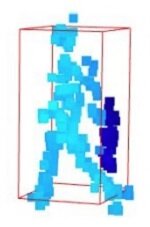
pcCluster.py - Preforms object detection on an image
pcldAnim.py - Animates the point cloud in the database
pcldView.py - Views a single point cloud
objAnim.py - Animates the point cloud with object detection enabled
depthToPC.py - Converts depth images to point clouds from an h5 file
dsetFormat.py - Creates a dataset from either depth images or point cloud images
h5Reader.py - Reads in point cloud images from an h5 file
sim.py - Simulates the point clouds with object detection and the rules enabled
Industry Sponsor(s):