College of Engineering Unit:
Electrical Engineering and Computer Science
Project Team Member(s):
C. Greyston Brady, Noah Koontz and Peter Bloch
Physical Location at Expo:
Community Plaza
Project ID:
ECE.31
Project Description:
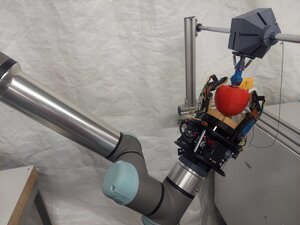
In 21st century, there is an increasing demand for labor in the agricultural sector. To address this, many are turning to robotics. Existing agricultural robots involve either expensive computational planning or do not support real-time adjustments to the picking environment. Apple Vision designed a low-cost system that can target and guide the palm of a custom apple grasper to within grabbing distance of an apple. Data is processed in real time and sent to the control system, which attempts to move towards the nearest apple. Changes in the environment lead to retrying the approach.
Project Website(s):
Industry Sponsor(s):