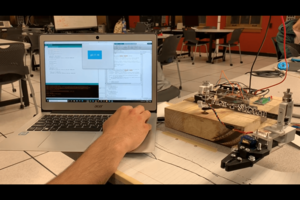
The Flex-a-Sketch is a 2-axis SCARA robotic arm. SCARA robots are commonly used in industrial and manufacturing applications to do precise and repetitive work that might be difficult to do manually e.g. 3D printing. The Flex-a-Sketch robot arm borrows some of these qualities to create line sketches that the user controls by flexing and turning their arm.
SCARA stands for Selective Compliance Articulated Robot Arm - meaning that the arm can move left and right, forward and backward, but not up and down (the height is fixed). The Flex-a-Sketch is made up of 2 joints - the elbow and the shoulder that allow for this kind of movement. The body of the robot was manufactured by a combination of laser-cut acrylic and 3D printed parts to connect the joints and end effector. The end effector - the gripper at the end - can hold a variety of writing tools e.g. pencil, pen, crayon, etc.
This robot is controlled through the user’s physical arm movements and through g-code commands. Our team used 2 sensors to detect the user’s arm movement: electromyography (EMG) electrodes and an accelerometer. The user attaches the EMG electrodes to their arm and wears the accelerometer on top of their hand like a watch. EMG sensors detect muscle movements and transmit electrical signals to a microcontroller. These signals act as a trigger by telling the robot when to move and when to stay still. The accelerometer sensor takes acceleration measurements and calculates the angle of the user’s wrist rotation, which controls the direction in which the robot draws by mapping the user’s wrist rotation to an angle. Finally, the Flex-a-Sketch robot arm takes g-code commands through a Matlab interface and moves accordingly. G-code commands are the standard way to control automated machines in the industry.
This project was a very brief introduction to working with EMG sensors, which is a type of sensor often used in prosthetic technology. The next step for this project would be a working prosthetic hand for below-elbow amputees that would allow them to control each individual finger by having a band of EMG sensors around their arm to detect muscle movements.
Come talk to us about the Flex-a-Sketch robotic arm, the Junior Design Expo’s Technical Choice Award-winning project!
| Attachment | Size |
|---|---|
| 1.14 MB | |
| 5.06 MB | |
| 234.49 KB |
